Détecteurs de présence intelligents
Mercredi 13 novembre 2024 @ 06:05:56
Mes "blocs systèmes" fonctionnent parfaitement mais pour mon futur réseau, je teste la possibilité de "les rendre intelligents" en utilisant des arduinos.
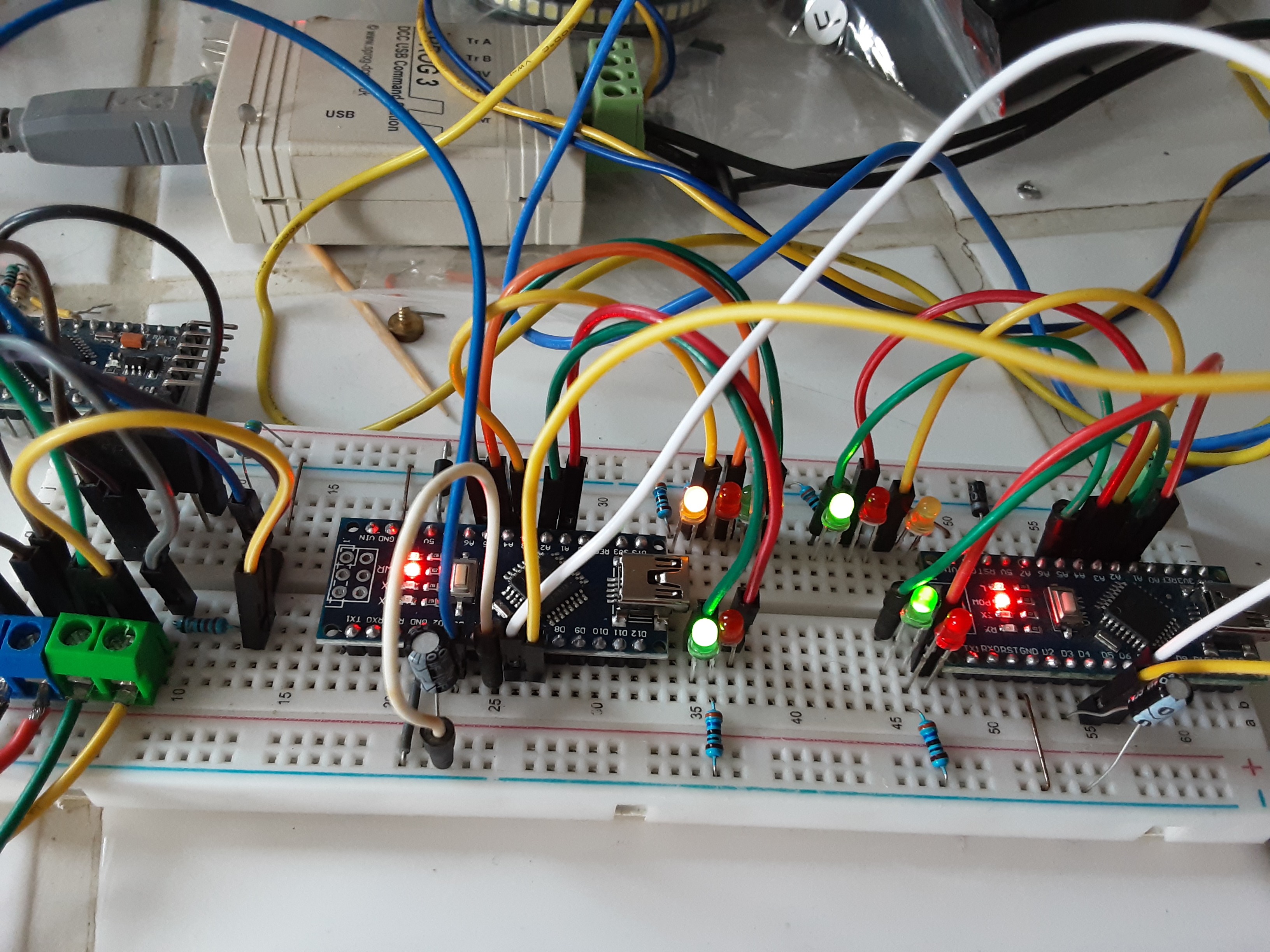
Mes "blocs systèmes" fonctionnent parfaitement mais pour mon futur réseau, je teste la possibilité de "les rendre intelligents" en utilisant des arduinos.





L'ordinateur qui gèrera les webcams et la Z21 est fonctionnel. La Z21 est connectée à l'ordinateur par RJ45 ce qui laissera le wifi pour la caméra embarquée ou l'accès internet si besoin. On utilise un émulateur (BlueSteacks pour ne pas le nommer) pour faire travailler l'application Android sous Windows(c) 10.

J'ai un tas d'anciens aiguillages Jouef à bobines. Je les ai transformés pour qu'ils fonctionnent avec des servomoteurs sous table. J'ai donc découpé les supports de bobines et percé le renvoi de mouvement.
Dans l'exemple ici, le trou de passage de la "corde à piano" est un peu trop grand ce qui nécessite une grande amplitude des angles Mini et Maxi du servomoteur. On est dans les limites, mais ca passe. Un perçage à 0.9mm est largement suffisant.
La régulation se fait automatiquement par les blocs systèmes ( voir ./article.php?sid=183) et le système ABC de chez Lenz.
Encore des réglages à faire sur le ralentissement avant arrêt au feu rouge (d'ailleurs il y a beaucoup de feux à ajouter ... lol ). L'animation de la sortie du mariage est commandée par Arduino en Infra Rouge.
| Etat | Forum | Sujet | Réponse | Dernier Auteur | Date |
|---|