
Bloc utilisateur
Se connecter
Le réseau : Installation des premiers moteurs d'aiguillage
Les aiguillages Jouef installés à l'origine ont été remplacés par des Péco (sauf les 3 TJD qui restent de marque Jouef). Utilisation de classiques servo-moteurs SG 90 pas trop onéreux (autour de 1.20 euros) et relativement fiables.
Remplacement de la liaison par corde à piano par un ressort pour amortir le mouvement.
Pour commander ces moteurs, j'ai essayé de réaliser de nombreux montages sur la base de la multitude de schémas qu'on trouve sur le net, mais aucun n'a fonctionné correctement.
J'ai donc choisi d'utiliser le système DLY (platines et supports de moteur).
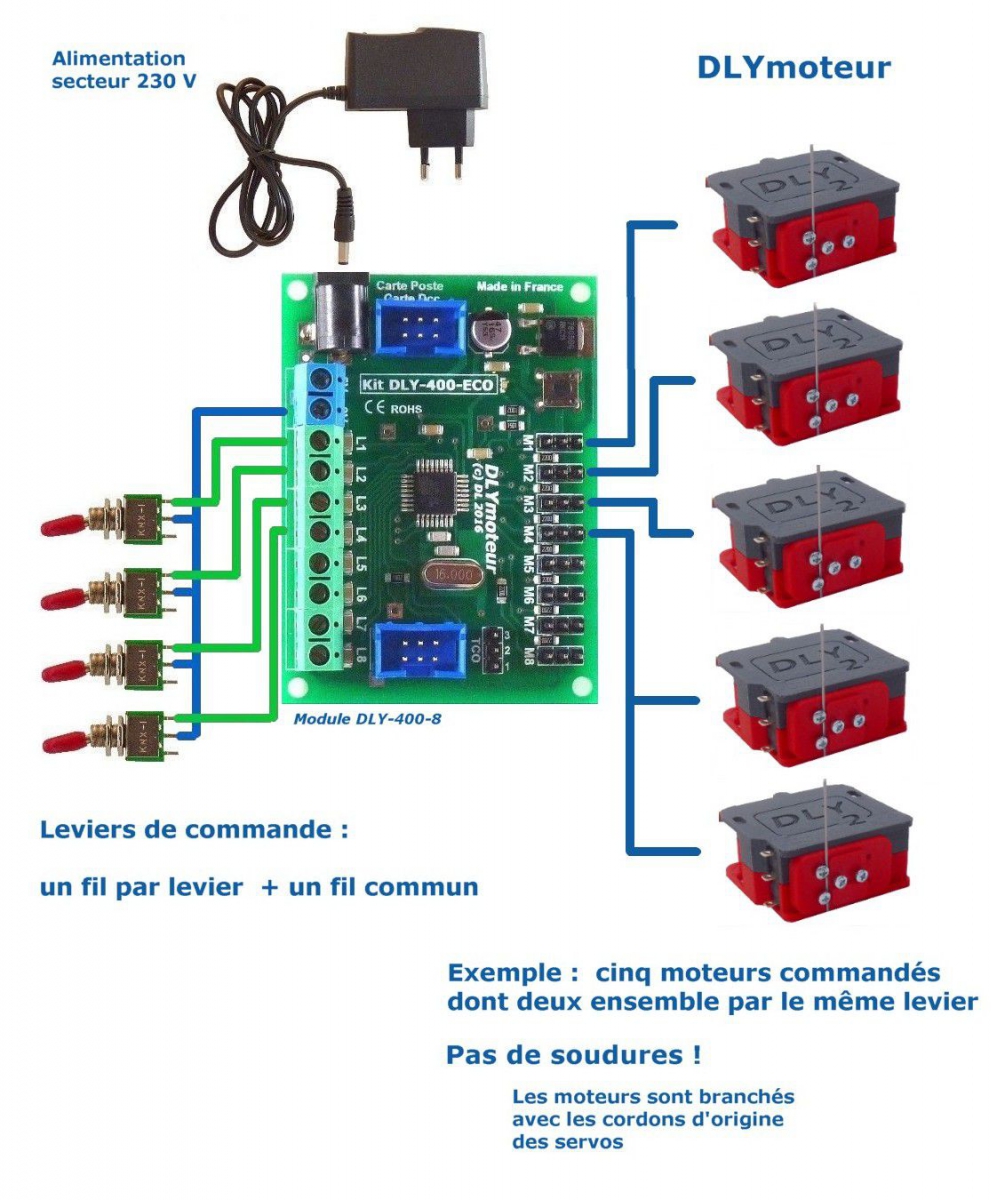 Le système DLY a l'avantage de pouvoir régler la vitesse de déplacement de la partie mobile des aiguillages ainsi que la course totale de déplacement. Gros inconvénients, le réglage de la vitesse ne propose que 3 valeurs et la course totale 6 valeurs. Les réglages ne sont donc pas progressifs et le positionnement mécanique du moteur par rapport à l'aiguillage doit être très précis ce qui est parfois très difficile à faire quand on est dans un montage "sous table".
Le système DLY a l'avantage de pouvoir régler la vitesse de déplacement de la partie mobile des aiguillages ainsi que la course totale de déplacement. Gros inconvénients, le réglage de la vitesse ne propose que 3 valeurs et la course totale 6 valeurs. Les réglages ne sont donc pas progressifs et le positionnement mécanique du moteur par rapport à l'aiguillage doit être très précis ce qui est parfois très difficile à faire quand on est dans un montage "sous table".
Chaque boitier permet de gérer 8 moteurs. Cette solution, d'excellente qualité technique, revient assez cher (la platine de commande coûte 36 euros pour 8 moteurs) plus bien sur les moteurs.
J'ai donc pris le parti d'une deuxième solution à base de testeurs de servomoteurs chinois.

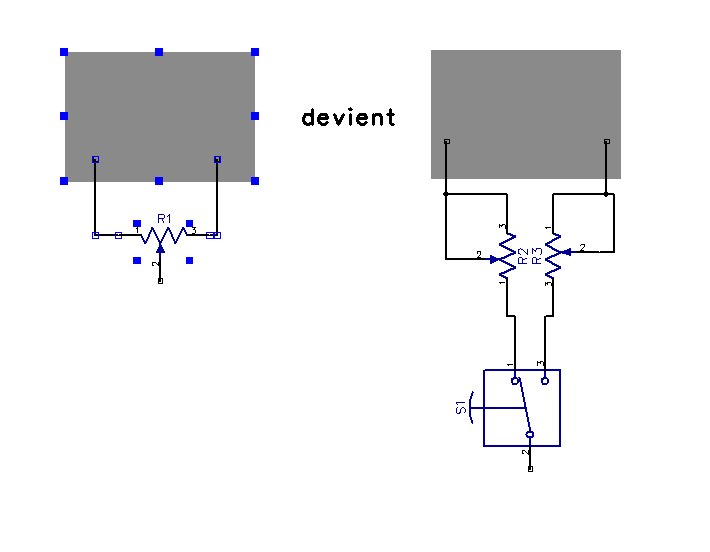
Il a fallu légèrement modifier ces petits testeurs du commerce (moins de 1 euros) en remplacant le potentiomètre par deux résistances variables sélectionnées à l'aide d'un switch inverseur et réglant ainsi les butées gauche et droite.
Regroupement de 6 testeurs sur une platine "maison". La platine de commande revient à moins de 7 euros pour 6 moteurs d'aiguillages. Le réglage des limites de la course est très facile et précis mais il n'y a aucun réglage de la vitesse.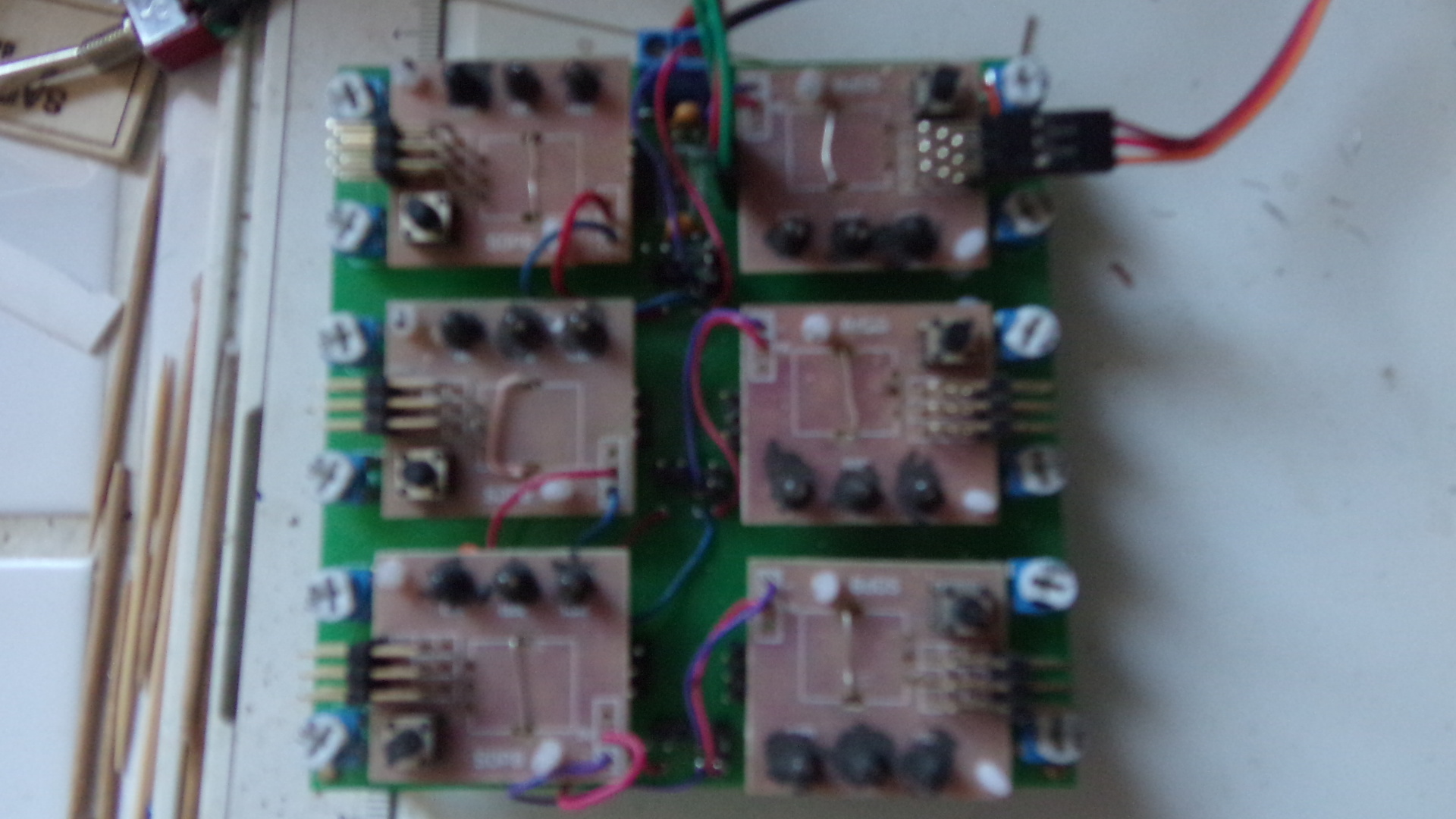
Au niveau des moteurs, les SG-90 sont installés soit sur une forme d'équerre avec 2 micro-switches pour gérer des équipements en fonction de la position des aiguillages soit dans les boitiers vendus chez DLY dans lesquels on peut également mettre 2 switches..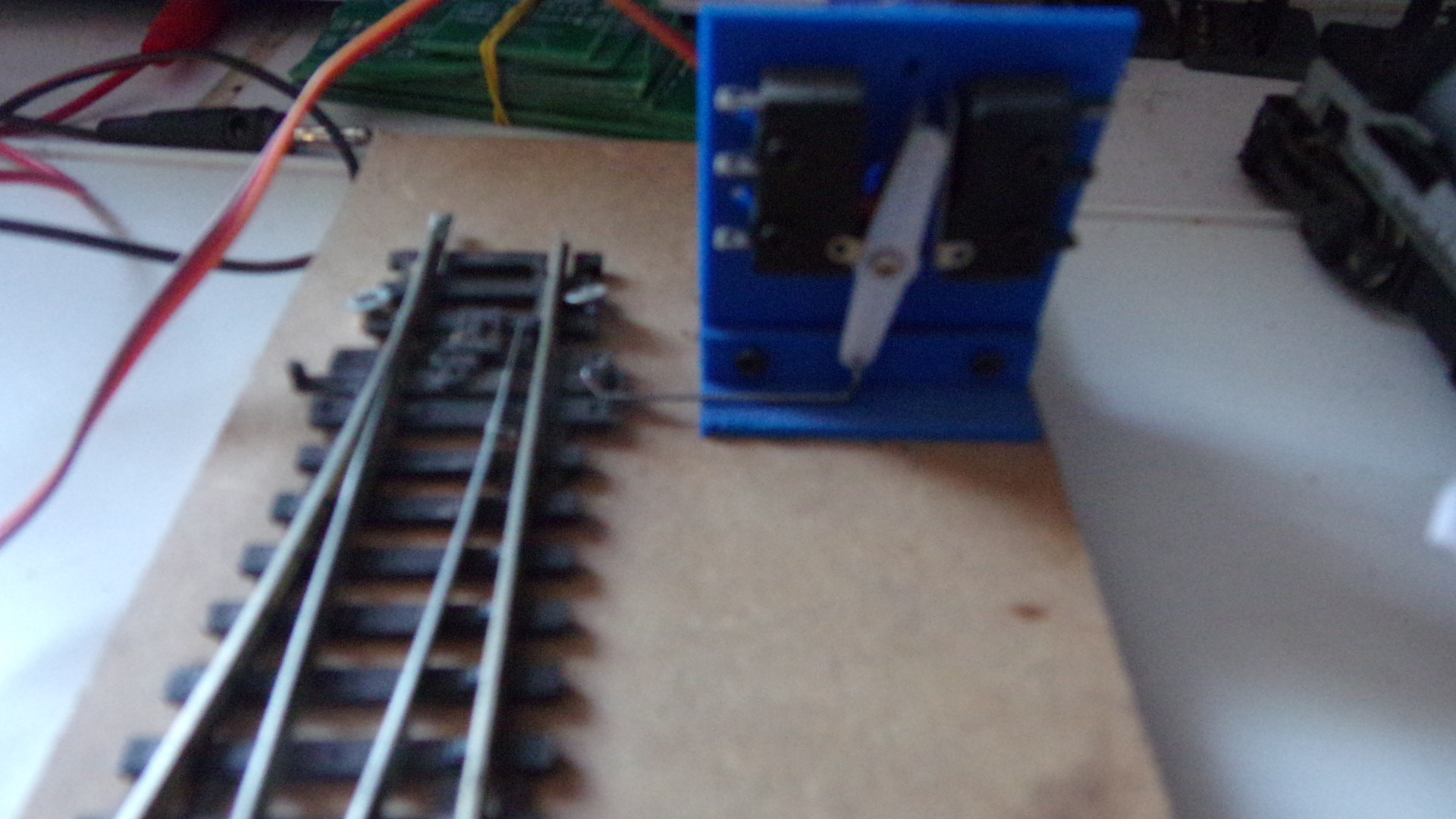
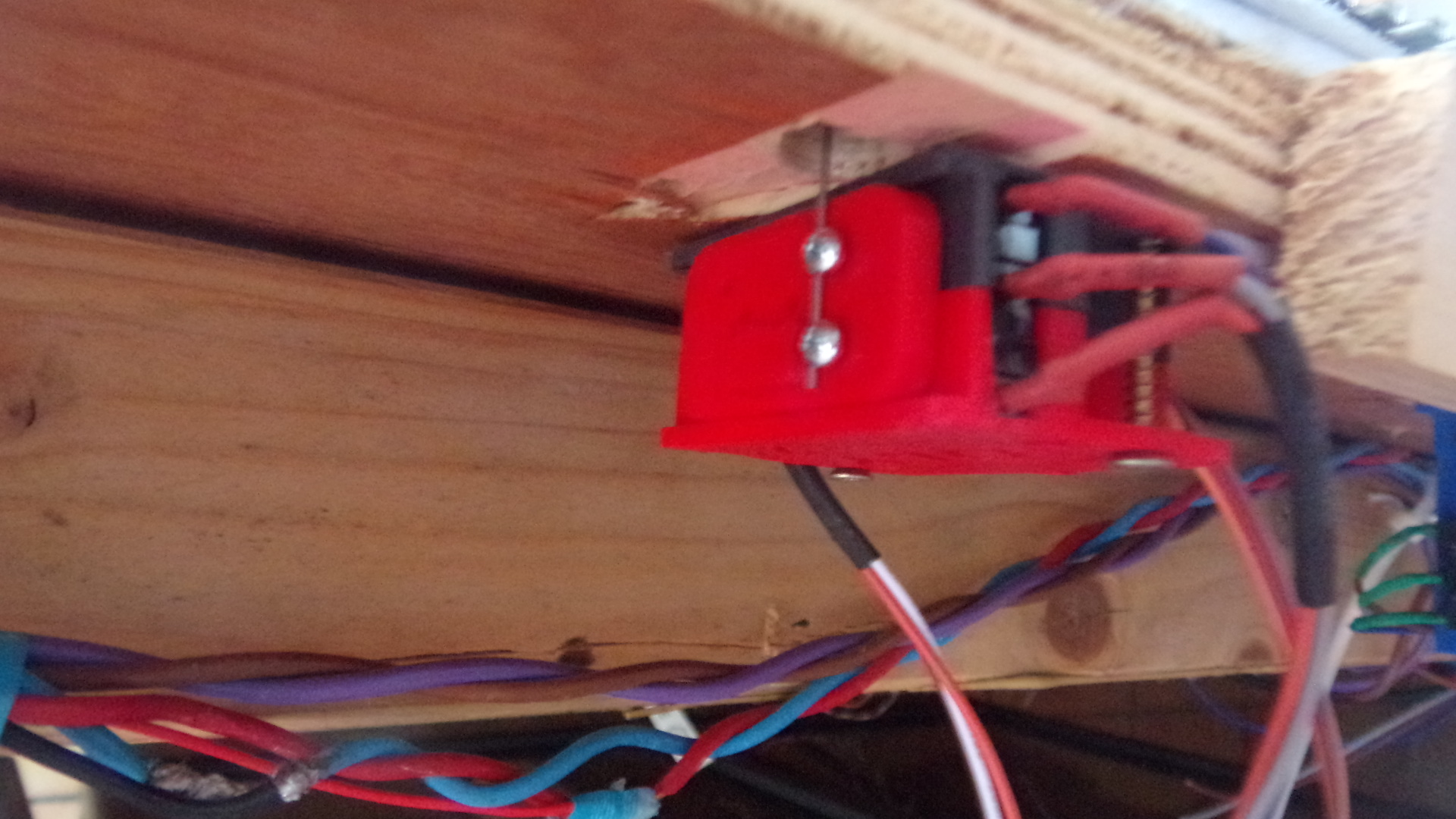
Les équerres peuvent être installées soit au dessus de la table soit en dessous, mais les DLY sont plus encombrants.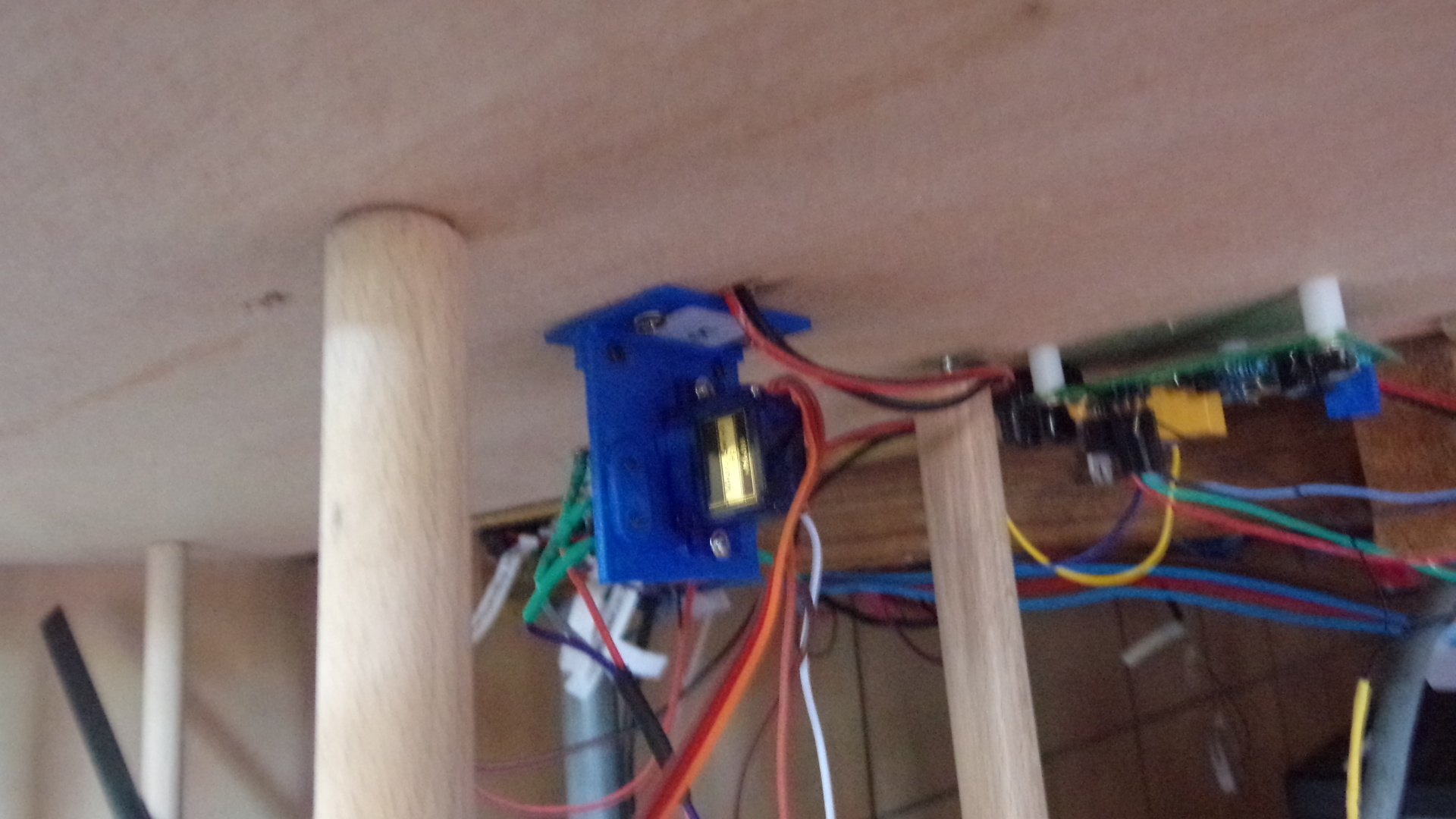
Je vais donc utiliser le système DLY pour les aiguillages qui sont exposés et mon système pour ceux moins visibles.
Sur les supports en équerre, j'ai aussi testé ce type de moteur MG90 S dont les engrenages sont en métal.
Ils sont un peu plus chers que les SG90 mais le fonctionnement est bien plus doux. Par contre les dimensions différent très légèrement et je ne suis pas certain qu'ils puissent entrer dans les supports DLY.
Pour commander ces platines, des inverseurs sont suffisants mais vont prendre beaucoup de place sur le TCO. J'avais donc pensé à une solution à base d'un stylet et d'un "plot" conducteur. L'idéal étant qu'une "touche" sur le même plot fasse basculer la position de l'aiguillage.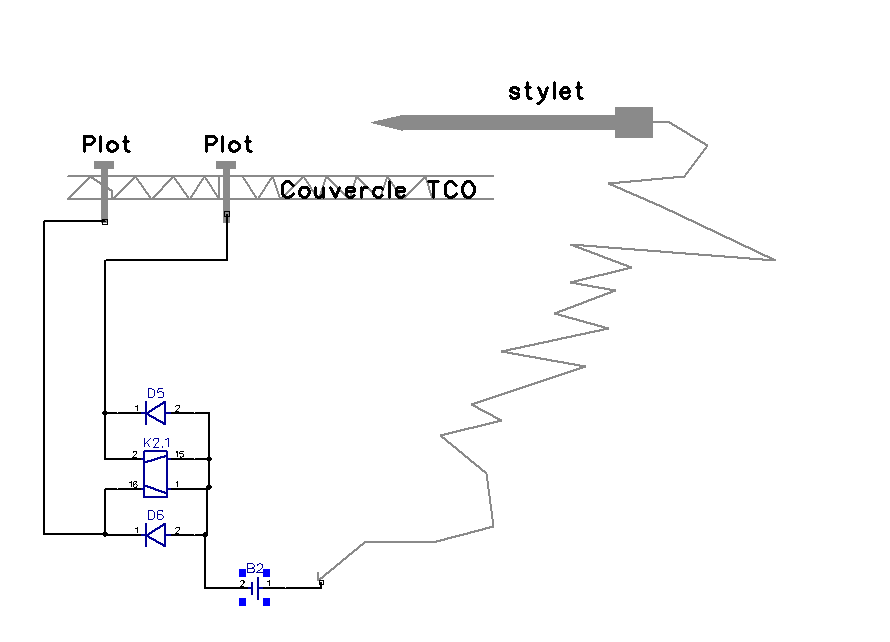
Pour gérer ca Serge Ducatez rencontré sur un groupe de FB propose une solution par Arduino .... bon bah voilà qu'il va me convaincre de me mettre à l'Arduino .... mais alors dans ce cas, pourquoi ne pas tout reprendre à zéro et dans le montage proposé intégrer la gestion du servomoteur (course de débattement et vitesse de rotation) d'autant que beaucoup ont déjà travaillé sur le sujet.
https://ardwinner.jimdofree.com/arduino/v-les-servomoteurs/2-contrôler-un-servomoteur-via-un-potentiomètre-knob/
L'idée serait, à partir de ce montage, d'abord de remplacer le potentiomètre par deux résistances variables successivement sélectionnées par un des RTC du bistable et d'introduire une temporisation dans le code pour "ralentir" le déplacement de l'aiguillage. L'idéal serait de rendre cette temporisation proportionnelle à la valeur d'une 3ème résistance variable. Voici le synoptique de Serge.
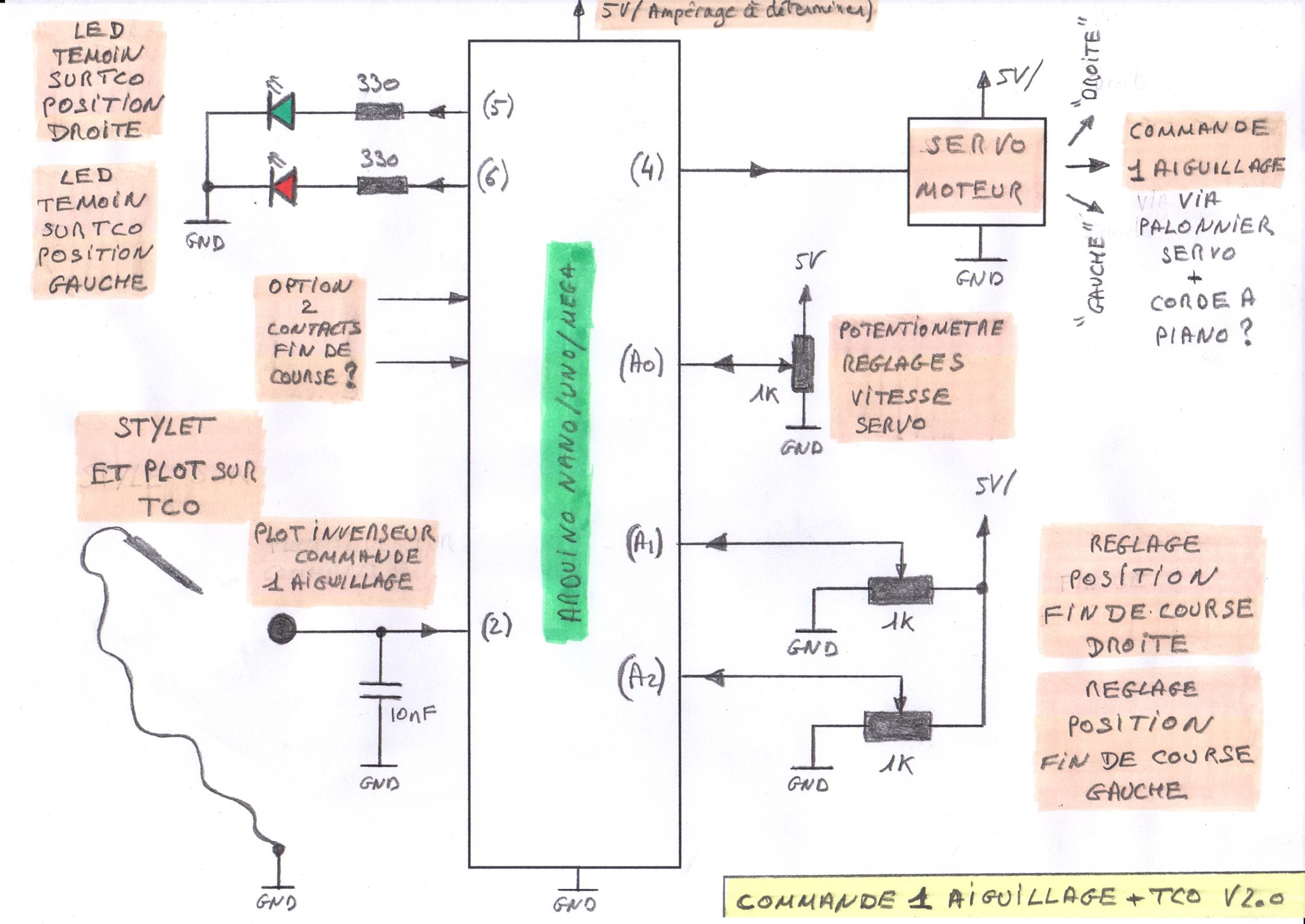
et le résultat de ses travaux publié sur Youtube
Commande d'un Servomoteur pour Aiguillage de Trains - TCO - v2.0 - Arduino Nano
On est pas loin de la perfection par rapport à mes besoins.
feedback 1 : j'ai réussi à contrôler un servomoteur à l'aide d'un montage à base de NE555 ... bon !!! c'est trop tard, mais après des dizaines de tests, j'y suis enfin arrivé. Je peux passer à autre chose.
fedback 2 : mon montage de 6 testeurs fonctionne mal. J'ai des interférences quand j'en branche plusieurs et avec 4 c'est totalement inutilisable. Comme ils ne sont liés les uns aux autres que par l'alimentation, il faudrait sans doute que je revois cette partie. Mais bon, maintenant que je suis parti sur une gestion par Arduino, je ne vais pas perdre de temps la dessus.
ET C'EST PARTI AVEC ARDUINO
Premiers tests avec un simple mouvement de va et vient. Le réglage des butées gauche et droite ont été définie par tatonnement.
à suivre avec un nouveau post consacré à l'Arduino ....
Liens relatifs:
- En savoir plus à propos de : electroaiguillages
- Article de Philippe

-
Philippe
- Visitez le minisite
-