
Bloc utilisateur
Se connecter
L'atelier déménage
Avant dans l'arrière cuisine

Déménagement à la place de l'ancien réseau


Publié le : Lundi 1 juin 2026 à 05:48
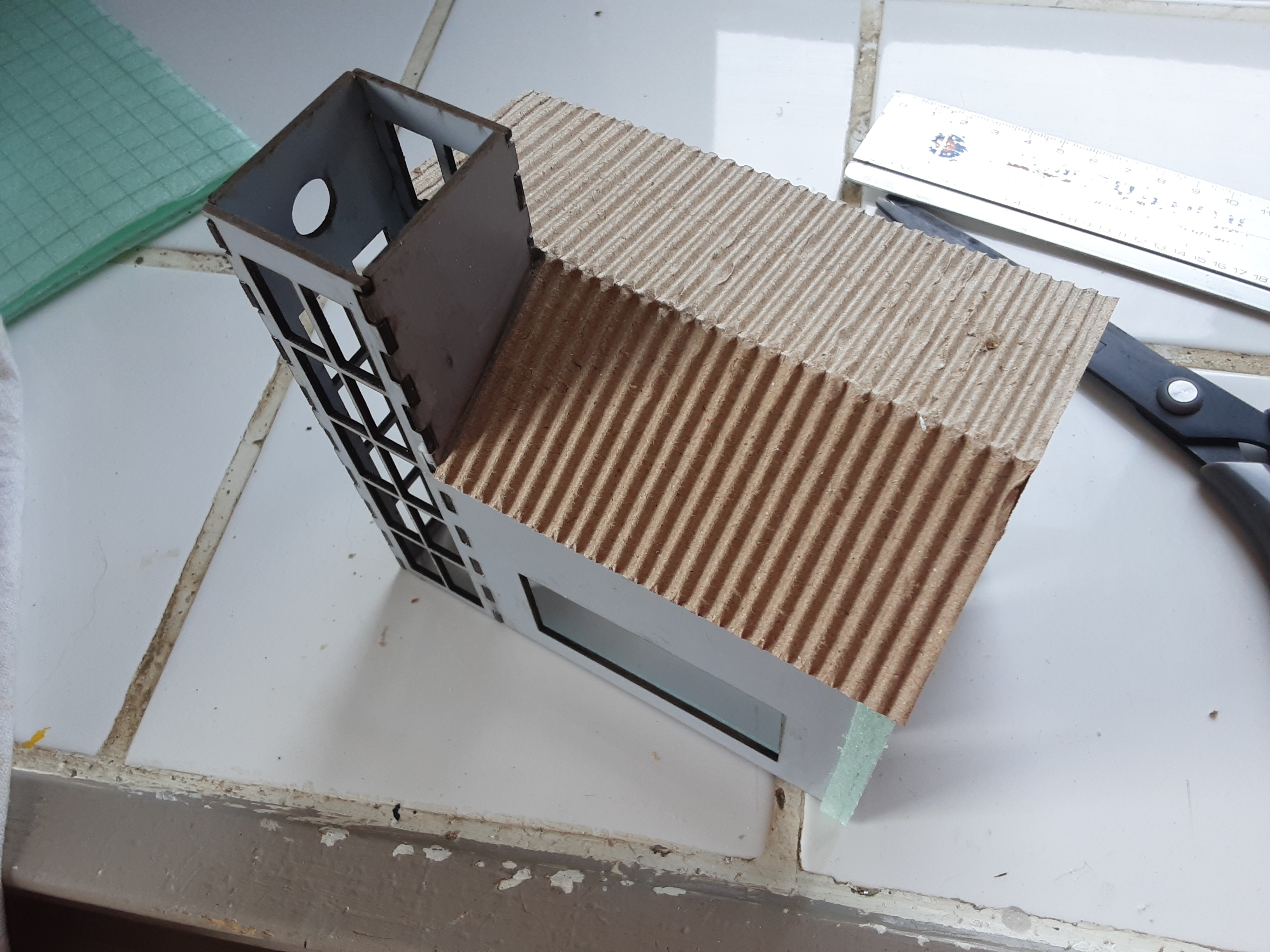
Un nouveau bâtiment (découpe laser)
Nouveau bâtiment pour cacher la carte arduino gérant les panneaux d'affichage de la gare et recevoir l'horloge de syncronisation.
Dessin du fichier svg sous Tinkercad et découpe laser par Ludo sur carton calendrier. Toiture boite carton
Publié le : Lundi 1 juin 2026 à 05:12
Nouvelle installation : un petit avant / après
AVANT

APRES

Publié le : Samedi 17 janvier 2026 à 17:52

Commandes de la Z21 par ordinateur
L'ordinateur qui gèrera les webcams et la Z21 est fonctionnel. La Z21 est connectée à l'ordinateur par RJ45 ce qui laissera le wifi pour la caméra embarquée ou l'accès internet si besoin. On utilise un émulateur (BlueSteacks pour ne pas le nommer) pour faire travailler l'application Android sous Windows(c) 10.

Publié le : Lundi 4 novembre 2024 à 07:06
Nos visiteurs
Total:
En ligne:
40904
1
Restez informés
Si vous êtes enregistrés et connectés vous avez la possibilité de choisir d'être avertis quand un nouvel article est ajouté au site
Cliquez ICI
Puis cochez en bas de page les sujets pour lesquels vous souhaitez être avertis si un nouvel article est posté.
Lettre d'information
Activité du Site
Pages vues depuis 16/06/2025 : 389 458
- Nb. de membres 7
- Nb. d'articles 146
- Nb. de forums 2
- Nb. de sujets 48
- Nb. de critiques 0